


")














Kawasaki a récemment dévoilé son concept de Corleo, un « cheval robotisé », généré par ordinateur. La vidéo montre l’équidé automatisé galopant dans les vallées, traversant des rivières, escaladant des montagnes et sautant par-dessus des crevasses.
La Corleo promet une solution robotique haut de gamme pour une expérience de mobilité révolutionnaire. Les motos Kawasaki actuelles sont cantonnées aux routes, chemins et sentiers, mais une machine à jambes ne connaît pas de limites : elle peut atteindre des endroits inaccessibles aux autres véhicules.
Mais dans le cas du Corleo, est-il possible d’atteindre un tel niveau d’agilité et d’équilibre, tout en transportant un humain en toute sécurité dans des environnements naturels ? Voyons ce qui serait nécessaire pour y parvenir.
Un robot est une machine complexe composée de deux éléments principaux : un corps et une unité de traitement de l’information. Le corps possède une morphologie particulière qui détermine la fonction du robot et intègre des actionneurs (dispositifs qui convertissent l’énergie en mouvement physique) et des capteurs permettant respectivement d’agir dans le monde et de le comprendre.
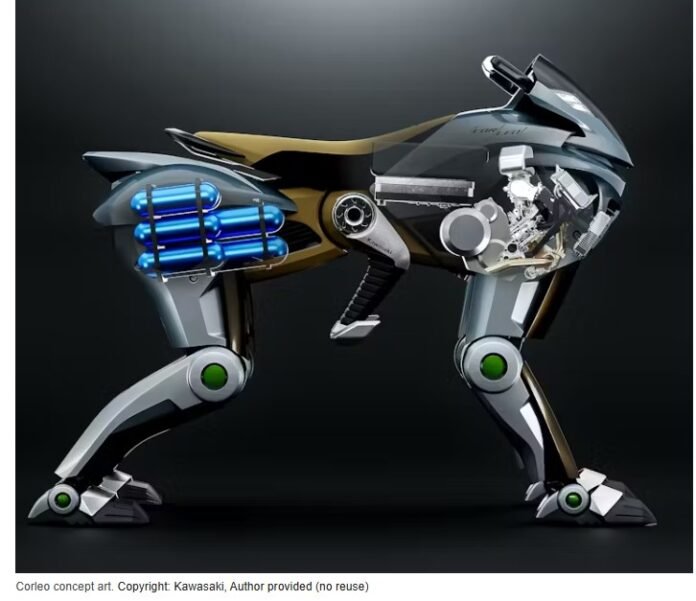
Concept de cheval robotique Corleo de Kawasaki
L’unité de traitement de l’information est généralement un ordinateur, qui met en œuvre des algorithmes pour traiter les données des capteurs, construire des représentations du monde et déterminer les actions à exécuter, sous réserve d’une tâche spécifique d’intérêt.
Les robots simples, comme les aspirateurs robots, répondent à ces exigences. Leur corps est adapté pour passer sous les meubles sans rester coincé (leur partie supérieure plate est également pratique pour transporter vos chats).
Les actionneurs sont les moteurs qui font tourner les roues et le système d’aspiration. Il est équipé de capteurs d’impact pour détecter les collisions, et certains aspirateurs sont même équipés de caméras pour analyser l’environnement. Les utilisateurs peuvent définir une routine de nettoyage, et l’ordinateur de l’aspirateur déterminera la meilleure façon de l’exécuter.
Le Corleo est un robot quadrupède, l’une des configurations robotiques à pattes les plus stables. Ses quatre pattes semblent solides et capables de se plier d’avant en arrière pour courir et sauter.
Mais ils semblent limités dans les mouvements appelés abduction et adduction . Si je vous pousse sur le côté droit, vous ouvrirez la jambe gauche ; c’est le mouvement d’abduction qui vous aide à garder l’équilibre.
L’adduction est le mouvement inverse : un déplacement vers la ligne médiane du corps. Il s’agit peut-être simplement d’une limitation de conception, mais quoi qu’il en soit, la Corleo a besoin de cette articulation pour garantir une conduite sûre et fluide.
Viennent ensuite les actionneurs. Contrairement aux véhicules à roues, les robots à pattes doivent constamment s’équilibrer et supporter leur propre poids. Ils offrent également un niveau de suspension qui amortit le poids du conducteur.
Ils doivent être suffisamment puissants pour propulser le corps du robot vers l’avant. De plus, le Corleo peut également transporter une personne. Bien que cela soit actuellement possible, comme avec le robot Barry ou les robots à roues Unitree , le Corleo vise également à galoper et à franchir des obstacles. Cela nécessite des actionneurs encore plus dynamiques et plus puissants que les exemples précédents.
Une voiture ou une moto à conduite manuelle n’a pas besoin de capteurs ni d’unité de traitement, car le conducteur dirige la voiture en fonction de ce qu’il voit. En revanche, un cheval robotisé nécessite des systèmes de contrôle plus sophistiqués pour déterminer le mouvement des jambes ; sinon, nous aurions besoin de nos deux mains , voire de nos pieds, pour le conduire.
Le contrôle de la locomotion est un domaine actif de recherche en robotique à pattes depuis les années 1940. Les chercheurs ont montré qu’une machine à pattes peut descendre une pente sans moteurs ni capteurs (ce qu’on appelle la locomotion « passive »).
Si seuls des capteurs « proprioceptifs » – ceux qui indiquent à votre téléphone quand faire pivoter l’écran – sont utilisés pour contrôler l’équilibre, on parle de locomotion « aveugle », car elle ne dépend pas des informations de l’environnement extérieur. Lorsqu’un robot utilise également des capteurs « extéroceptifs » pour déterminer sa marche, c’est-à-dire des capteurs qui captent des informations sur l’environnement, on parle de locomotion « perceptive » . C’est ce que Corleo démontre.
D’après les photos publiées, je n’ai repéré aucune caméra ni aucun télémètre laser. Ils pourraient être cachés, mais il serait rassurant de savoir que le Corleo peut « voir » ce qui se passe devant lui en marchant.
Bien qu’il soit piloté manuellement (et donc sans navigation autonome), son système de locomotion a besoin de données de capteurs pour déterminer comment marcher sur des rochers ou détecter si le terrain est glissant. Ses capteurs doivent également être fiables dans différentes conditions environnementales. C’est déjà un défi de taille pour les voitures autonomes.
Les défis à venir
Le Corleo est un concept, il n’existe pas encore. En tant que produit, il promet d’être une version plus performante du quad. Cela pourrait ouvrir de nouvelles perspectives pour le transport en zones reculées, le tourisme, de nouveaux loisirs (pour ceux qui en ont les moyens) et même le sport.
Mais ce qui m’enthousiasme le plus, ce sont les avancées technologiques qu’implique la réalisation d’une telle plateforme. Les robots à pattes ne doivent pas nécessairement ressembler à des quadrupèdes ou à des humanoïdes.
Les exosquelettes auto-équilibrés, tels que le Personal exoskeleton de Wandercraft ou le XoMotion de Human in Motion Robotics , sont des robots à pattes qui révolutionnent la vie des personnes à mobilité réduite. Les avancées technologiques du Corleo pourraient être d’un grand apport au développement d’appareils d’assistance pour les personnes handicapées, leur permettant ainsi de gagner en autonomie.
Les progrès actuels en robotique à pattes suggèrent que de nombreuses fonctionnalités proposées par Kawasaki sont réalisables. Mais d’autres posent des défis : Corleo devra posséder l’endurance nécessaire pour marcher en milieu naturel, exécuter des algorithmes de locomotion efficaces et respecter les normes de sécurité requises pour un véhicule.
Ce sont tous des obstacles majeurs pour un robot de taille raisonnable. Si vous me posez la question aujourd’hui, je doute que cela soit réalisable dans son ensemble. J’espère qu’ils me donneront tort.
Matías Mattamala
Chercheur postdoctoral, Oxford Robotics Institute, Université d’Oxford

{kind=link}